산업용 서보 모터 야스카와 전기 4500 W 1500 RPM 서보 모터 SGMDH-45A2B-YR14
신속한 세부 정보
모델 SGMDH-45A2B-YR14
제품 종류 AC 서보 모터
정량 출력 4500w
등급 토크 28.4Nm
가속 1500RPM
전원 공급 전압 200vAC
가속 전류 32.4Amps
다른 우수한 제품
야사카와 모터, 드라이버 SG- 미쓰비시 모터 HC-HA-
웨스팅하우스 모듈 1C, 5X- 에머슨 VE, KJ-
하니웰 TC,TK- Fanuc 모터 A0-
로즈마운트 송신기 3051- 요코가와 송신기 EJA-
비슷한 제품
| SGMDH |
설명 |
제조사 |
| SGMDH-056A2A-YR25 |
SGMDH056A2AYR25 서보 모터 |
야스카와 |
| SGMDH-06A2 |
SGMDH06A2 세르보 모터 |
야스카와 |
| SGMDH-06A2A-TR25 |
SGMDH06A2ATR25 세로 모터 |
야스카와 |
| SGMDH-06A2A-YR |
SGMDH06A2AYR 서보 모터 |
야스카와 |
| SGMDH-06A2A-YR11 |
SGMDH06A2AYR11 서보 모터 |
야스카와 |
| SGMDH-06A2A-YR12 |
SGMDH06A2AYR12 세로모터 |
야스카와 |
| SGMDH-06A2A-YR13 |
SGMDH06A2AYR13 서보 모터 |
야스카와 |
| SGMDH-06A2A-YR14 |
SGMDH06A2AYR14 서보 모터 |
야스카와 |
| SGMDH-06A2A-YR24 |
SGMDH06A2AYR24 서보 모터 |
야스카와 |
| SGMDH-06A2A-YR25 |
SGMDH06A2AYR25 서보 모터 |
야스카와 |
| SGMDH-06A2A-YR26 |
SGMDH06A2AYR26 2.63NM 550W 4AMP 2000RPM 200V |
야스카와 |
| SGMDH-12A2 |
SGMDH12A2 세로 모터 |
야스카와 |
| SGMDH-12A2A-YA14 |
SGMDH12A2AYA14 서보 모터 |
야스카와 |
| SGMDH-12A2A-YR |
SGMDH12A2AYR 서보 모터 |
야스카와 |
| SGMDH-12A2A-YR12 |
SGMDH12A2AYR12 서보 모터 |
야스카와 |
| SGMDH-12A2A-YR13 |
SGMDH12A2AYR13 AC 2000RPM 1150W 200V 7.3AMP 5.49NM |
야스카와 |
| SGMDH-12A2A-YR14 |
SGMDH12A2AYR14 서보 모터 |
야스카와 |
| SGMDH-12A2A-YR15 |
SGMDH12A2AYR15 서보 모터 |
야스카와 |
| SGMDH-12A2A-YR21 |
SGMDH12A2AYR21 서보 모터 |
야스카와 |
| SGMDH-12A2A-YRA1 |
SGMDH12A2AYRA1 서보 모터 |
야스카와 |
| SGMDH-13A2A-YR23 |
SGMDH13A2AYR23 서보 모터 |
야스카와 |
| SGMDH-20A2A21 |
SGMDH20A2A21 세로 모터 |
야스카와 |
| SGMDH-22A2 |
SGMDH22A2 세르보 모터 |
야스카와 |
| SGMDH-22A2A-YR11 |
SGMDH22A2AYR11 SIGMA II 2.2KW L/U AXIS SK45X |
야스카와 |
| SGMDH-22A2A-YR12 |
SGMDH22A2AYR12 서보 모터 |
야스카와 |
| SGMDH-22A2A-YR13 |
SGMDH22A2AYR13 서보 모터 |
야스카와 |
| SGMDH-22A2A-YR13YA |
SGMDH22A2AYR13YA 서보 모터 |
야스카와 |
| SGMDH-22A2A-YR14 |
SGMDH22A2AYR14 서보 모터 |
야스카와 |
| SGMDH-22A2A-YR32 |
SGMDH22A2AYR32 세로 모터 |
야스카와 |
| SGMDH-22ACA61 |
SGMDH22ACA61 세르보 모터 |
야스카와 |
| SGMDH-30A2A-YR31 |
SGMDH30A2AYR31 서보 모터 |
야스카와 |
| SGMDH-30A2A-YR32 |
SGMDH30A2AYR32 서보 모터 |
야스카와 |
| SGMDH-32A2 |
SGMDH32A2 세르보 모터 |
야스카와 |
| SGMDH-32A2A |
SGMDH32A2A 서보 모터 |
야스카와 |
| SGMDH-32A2A-YA14 |
SGMDH32A2AYA14 서보 모터 |
야스카와 |
| SGMDH-32A2A-YR11 |
SGMDH32A2AYR11 서보 모터 |
야스카와 |
| SGMDH-32A2A-YR12 |
SGMDH32A2AYR12 서보 모터 |
야스카와 |
| SGMDH-32A2A-YR13 |
SGMDH32A2AYR13 AC 3.2KW SIGMA 2 S축 |
야스카와 |
| SGMDH-32A2A-YR14 |
SGMDH32A2AYR14 서보 모터 |
야스카와 |
| SGMDH-32A2A-YR51 |
SGMDH32A2AYR51 세르보 모터 |
야스카와 |
| SGMDH-32A2A-YRA1 |
SGMDH32A2AYRA1 세로 모터 |
야스카와 |
| SGMDH-32ACA-MK11 |
SGMDH32ACAMK11 서보 모터 |
야스카와 |
| SGMDH-32P5A |
SGMDH32P5A 서보 모터 |
야스카와 |
| SGMDH-40A2 |
SGMDH40A2 세르보 모터 |
야스카와 |
| SGMDH-40A2A |
SGMDH40A2A 서보 모터 |
야스카와 |
| SGMDH-40ACA21 |
SGMDH40ACA21 세로 모터 |
야스카와 |
| SGMDH-44A2A-YR14 |
SGMDH44A2AYR14 서보 모터 |
야스카와 |
| SGMDH-44A2A-YR15 |
SGMDH44A2AYR15 세로 모터 |
야스카와 |
| SGMDH-45A2A6C |
SGMDH45A2A6C 서보 모터 |
야스카와 |
| SGMDH-45A2B61 |
SGMDH45A2B61 세로 모터 |
야스카와 |
| SGMDH-45A2BYR |
SGMDH45A2BYR 서보 모터 |
야스카와 |
| SGMDH-45A2B-YR13 |
SGMDH45A2BYR13 서보 모터 |
야스카와 |
| SGMDH-45A2BYR14 |
SGMDH45A2BYR14 서보 모터 |
야스카와 |
| SGMDH-45A2B-YR14 |
SGMDH45A2BYR14 서보 모터 |
야스카와 |
| SGMDH-45A2BYR15 |
SGMDH45A2BYR15 서보 모터 |
야스카와 |
| SGMDH-45A2B-YR15 |
SGMDH45A2BYR15 서보 모터 |
야스카와 |
| SGMDH-6A2A-YR13 |
SGMDH6A2AYR13 서보 모터 |
야스카와 |
| SGMDH-6A2A-YR25 |
SGMDH6A2AYR25 서보 모터 |
야스카와 |
| SGMDH-A2 |
SGMDHA2 세로 모터 |
야스카와 |
| SGMDH-A2A |
SGMDHA2A 서버 모터 |
야스카와 |
• 컴퓨터에서 속도 루프와 위치 루프를 닫음으로써, 하나의 피드백 장치가 둘 다를 위해 사용될 수 있습니다.컴퓨터 각 축 접근 방식은 매우 높은 업데이트 비율이 속도 루프에 선택되는 경우에 유익합니다여러 축으로, 중앙 컴퓨터에 대한 부하는 높은 업데이트 속도 루프로 너무 커질 수 있습니다.
• 많은 조정된 움직임이 예상되는 경우 중앙 컴퓨터가 각 축에 직접 접근할 수 있습니다.컴퓨터 간 통신 링크는 긴밀한 협조를 제한하는 지연을 초래합니다.속도 루프는 이것을 용이하게 하기 위해 중앙 컴퓨터 접근 방식과 유사하게 유지될 수 있습니다.
아래와 같은 보드 다이어그램은 A와 흥분 주파수 사이의 관계를 보여줌으로써 출력 또는 피드백 (F) 이 명령 (C) 을 얼마나 잘 따르는지 정량화하는 데 도움이됩니다.주파수는 일반적으로 라디안/초로 표현됩니다..(ω) 는 초당 주기가 아닌 f (f) 이다. ω = 2πf ≈ 6.28 f이기 때문에 하나에서 다른 것으로 변환하기가 쉽습니다. 또한 1/ω은 f의 대역폭을 가진 낮은 통과 필터의 시간 상수입니다.일단 우리가 servo의 대역폭 (ω) 을 알고, 우리는 동등 필터 (1/ω) 의 시간 상수를 알고 따라서 단계 입력에 대한 반응을 예측할 수 있습니다.
스테이퍼 모터는 뭘 위해 쓰죠?
위치: 단계 가동기는 정확한 반복 단계로 움직이기 때문에 정확한 가동이 필요한 응용 프로그램에서 우수합니다.
3D 프린터, CNC, 카메라 플랫폼 및 X,Y 플로터와 같은 위치 설정 장치. 일부 디스크 드라이브는 읽기 / 쓰기 헤드를 위치하기 위해 단계 모터를 사용합니다.
속도 조절 ◎ 정확한 움직임 증가 또한 회전 속도의 우수한 통제를 허용
프로세스 자동화와 로봇
저속 토크 - 정상적인 DC 모터는 낮은 속도로 매우 많은 토크를 가지고 있지 않습니다.
낮은 속도의 최대 토크, 그래서 그들은 높은 속도의 낮은 속도를 필요로 응용 프로그램에 좋은 선택입니다
정확성.
모션 컨트롤의 많은 사용자는 판매자가 보드 다이어그램을 사용하여 특정 세르보 기능을 설명하려고 시도하는 것을 들었습니다. 움직임을 다루는 데 기본 이해가 필요합니다.정확한 발음은 "보디"입니다.보 데릭을 생각해 보세요. 보 데릭과 보 데릭의 다른 유사성을 발견할 수 있습니다.

 귀하의 메시지는 20-3,000 자 사이 여야합니다!
귀하의 메시지는 20-3,000 자 사이 여야합니다!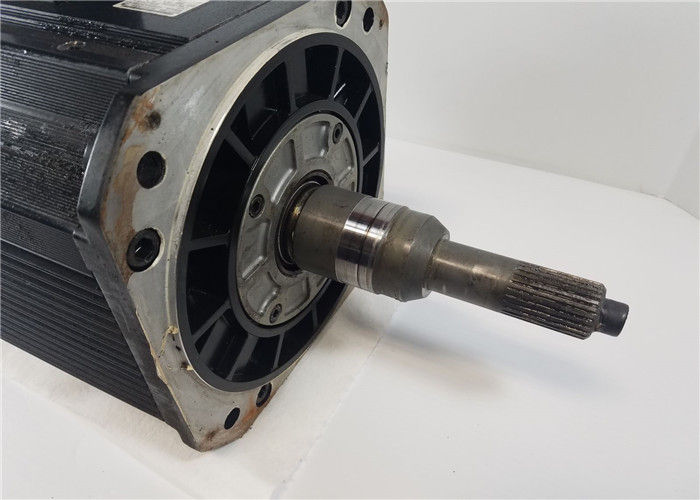
전체 평점
평점 스냅샷
모든 등급의 분포는 다음과 같습니다.모든 리뷰