SGMAH Sigma II Japan YASKAWA 0.637N.m 서보 모터 INsB SGMAH-02AAN21
사양
모델 SGMAH-02AAN21
제품 유형 AC 서보 모터
정격 출력 200w
정격 토크 0.637 Nm
정격 속도 3000RPM
전원 전압 200vAC
정격 전류 2.1Amps
기타 우수 제품
Yasakawa 모터, 드라이버 SG- Mitsubishi 모터 HC-,HA-
Westinghouse 모듈 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Fanuc 모터 A0-
Rosemount 송신기 3051- Yokogawa 송신기 EJA-
S유사 제품
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
DC 모터와 달리 서보 모터를 사용하면 제어 신호를 사용하여 모터 샤프트를 특정 위치(각도)에 배치할 수 있습니다. 제어 신호가 변경되지 않는 한 모터 샤프트는 이 위치를 유지합니다. 이는 로봇 팔, 무인 항공기 제어 표면 또는 특정 각도로 이동하여 새로운 위치에 유지하려는 모든 물체를 제어하는 데 매우 유용합니다.
서보 모터는 크기 또는 견딜 수 있는 토크에 따라 미니, 표준 및 자이언트 서보로 분류할 수 있습니다. 일반적으로 미니 및 표준 크기 서보 모터는 외부 전원 공급 장치나 드라이버 없이 Arduino에서 직접 전원을 공급받을 수 있습니다.
일반적으로 서보 모터에는 움직여야 하는 물체에 연결된 암(금속 또는 플라스틱)이 함께 제공됩니다(오른쪽 그림 참조).
세 번째 핀은 펄스 폭 변조(PWM) 신호인 제어 신호를 수신합니다. 모든 마이크로 컨트롤러 및 Arduino 보드에서 쉽게 생성할 수 있습니다.
이것은 회전할 각도를 알려주는 컨트롤러의 신호를 수신합니다. 제어 신호는 스테퍼 모터의 신호에 비해 상당히 간단합니다. 이는 단지 다양한 길이의 펄스일 뿐입니다. 펄스의 길이는 모터가 회전하는 각도에 해당합니다.
서보 모터의 제어 블록 다이어그램
외부에서 적용된 펄스 신호(펄스 입력 유형인 경우)와 서보 모터 인코더에서 감지된 회전이 계산되고 차이(편차)가 속도 제어 장치로 출력됩니다. 이 카운터를 편차 카운터라고 합니다.
모터 회전 중 편차 카운터에서 누적 펄스(위치 편차)가 생성되어 0으로 가도록 제어됩니다.
현재 위치를 유지하는 기능(서보 제어에 의한 위치 유지)은 위치 루프(편차 카운터)로 달성됩니다.

 귀하의 메시지는 20-3,000 자 사이 여야합니다!
귀하의 메시지는 20-3,000 자 사이 여야합니다!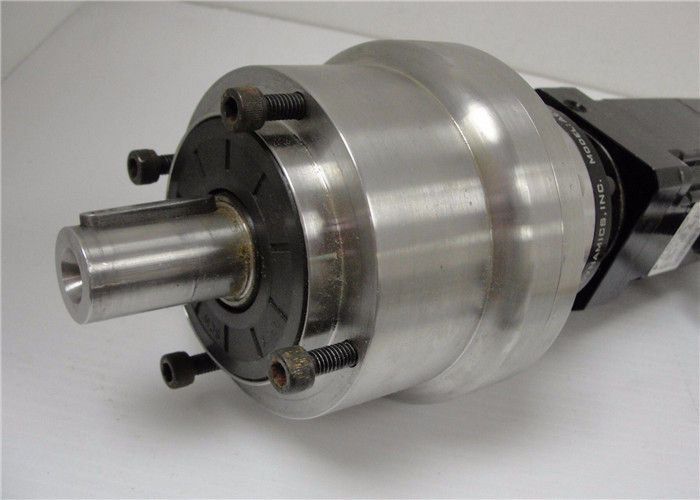
전체 평점
평점 스냅샷
모든 등급의 분포는 다음과 같습니다.모든 리뷰